Hot pixels
The table below shows the increase of hot pixels with longer
integration times for a selected region of the array. The percentage
of hot pixels in darks of different exposure times within the image
section [150:400,550:800] has been estimated. Pixels are in this case
considered bad when they differ by more than 110 ADU from expected,
where 110 ADU = 10 sigma with sigma being the worst-case noise level
(i.e. taken from the dark image with 729s exposure time). These data
were obtained Sep-2003 in reset-read-read mode.
Percentage of hot pixels in a dark image section.
| Quadrant |
Exptime [s] |
Cold [%] |
Hot [%] |
| 2 | 0 | 0.2 | 0.3 |
| 2 | 3 | <0.1 | 0.4 |
| 2 | 9 | <0.1 | 0.6 |
| 2 | 27 | <0.1 | 1.0 |
| 2 | 81 | <0.1 | 1.9 |
| 2 | 243 | <0.1 | 3.4 |
| 2 | 729 | <0.1 | 7.4 |
Dark level
From several sets of dark frames with exposure times 0s, 1s, 3s, 5s, 25s,
and 50s we have plotted the mean levels per quadrant as a function of
integration time. There is no clear repetitive dependence on integration time,
however. Either the dark current is too small to be measurable or it is not
linear with time. A rough indication of the dark current is thus that it is
less than 1 e-/s per pixel. The peak of the histogram varies from
about 30 to 60 ADU whether the integration time is 0s or 50s. The level
seems not to be dependent on what level the detector has seen just before.
Because the dark current is so small (but variable) we currently do not
recommend obtaining dark images at a different time than the target frames
for use in the data reduction of background
limited images. The dark is probably best eliminated by the automatic
subtraction of it together with the sky subtraction. If you plan to make
flatfields out of the target frames, however, you'll need to correct for
the dark. The investigation of the dark images is on-going.
The pick-up noise described below with amplitudes as large as 20 ADUs have a
strong effect on the very low level darks. Because the images are stored as
unsigned integers, negative values will wrap around to very high values.
This produces very nasty looking images, which need special "treatment"
before they can be used.
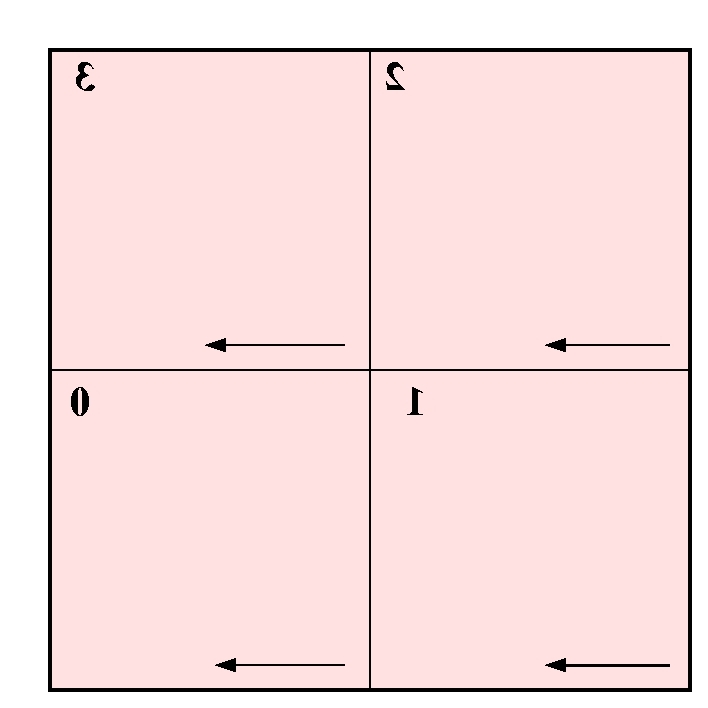
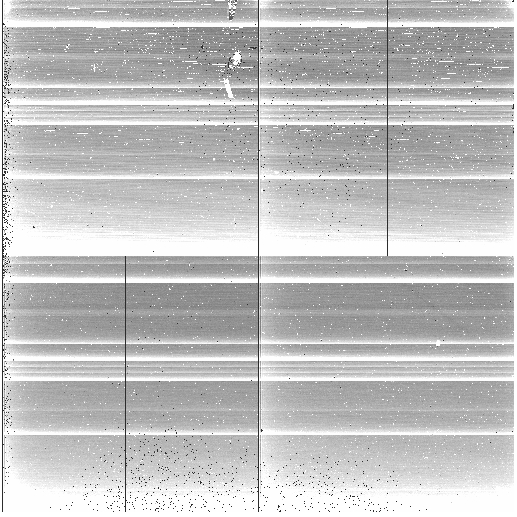
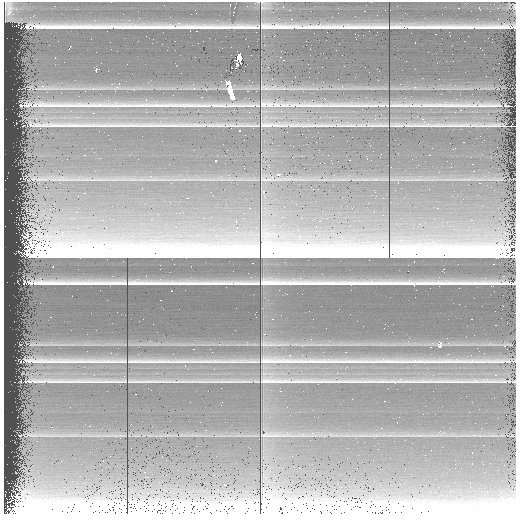
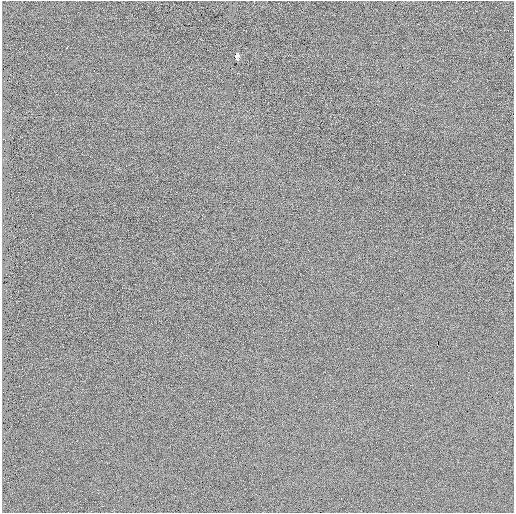
Pick-up noise
Fig 5: Example of the pick-up noise situation in May 2003 (left)
and in Sep 2003 (right), before and after the improvement, respectively.
Each of the images below are difference images of two independent dark
frames. The readout noise was reduced from 24 electrons to 10-12 electrons
with the removal of the pick-up noise in 2003.
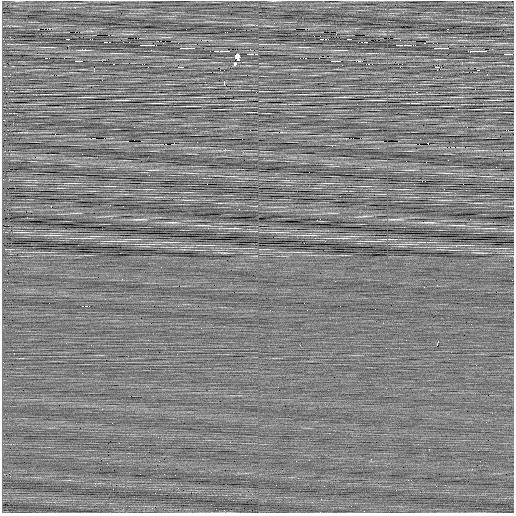
Before September 2003 all data suffer to some extent from the interference
pattern visible on the left image above. As can be seen, the effect is
strongest in the quadrants #2 and #3 (the upper ones), while the lower
two (#1 and #0) are looking much nicer. The interference pattern is due
to pick-up noise and seems to vary with time. Usually it is eliminated
completely in the combination of several images that are well within BLIP
(background limited performance), but it can be persistent, especially in
images of very low background, and the peak to peak variation was
generally around 20 ADUs. In order to beat this noise, it was usually
recommended to try to select integration times such that the background
was around 1200 ADUs minimum, and to have at least 10-20 images to median
combine. Also, results were generally better using the ramp-sampling mode
with many readouts.
As a consequence of the pick-up noise combined with the fact that the data
is stored as unsigned integers, there were frequently pixels which got
negative values in the reset frame subtraction of very low count level
images (e.g. darks). These negative values then wrapped around to very
high positive numbers and such images would have to be treated for this
effect before they could be used.
Until its removal, the pick-up noise was always present, even in the
first tests in the lab. After having tried several solutions without
success, it was finally the physical separation between the power
supply for the array electronics and the electronics itself which gave
results. The power supply unit was moved step by step out of the
electronics box, and the effect decreased correspondingly.
Readout noise
The readout noise in [e-] for the reset-read-read mode.
| Date |
Quad 0 |
Quad 1 |
Quad 2 |
Quad 3 |
Median overall |
| 28-Jan-2002 |
17 |
21 |
26 |
24 |
24 |
| 31-Mar-2002 |
20 |
9 |
22 |
22 |
19 |
| 8-Jun-2002 |
16 |
20 |
27 |
25 |
21 |
| 16-Sep-2002 |
16 |
19 |
30 |
21 |
21 |
| 05-Jul-2003 |
12 |
12 |
14 |
13 |
12 |
The readout noise is calculated in a representative area within each
quadrant, and the same areas are used for all dates. The overall median
is the median of the value found in 81 boxes over the whole array.
Note the improvement from July 2003. This is when the solution to the
problem of the pick-up noise was found and remedied.
Since January 2003 the readout noise has been monitored regularly for
both readout modes. Check the monitoring results:
reset-read-read mode
ramp-sampling mode
Please, check the NOTCam User's Guide
for a description of the two different readout modes available with
NOTCam.
Gain
The gain in [e-/ADU] for the
reset-read-read mode.
| Date |
Quad 0 |
Quad 1 |
Quad 2 |
Quad 3 |
Median overall |
| 28-Jan-2002 |
3.3 |
3.2 |
3.4 |
3.2 |
3.2 |
| 31-Mar-2002 |
2.8 |
2.2 |
2.8 |
2.7 |
2.8 |
| 8-Jun-2002 |
3.1 |
2.9 |
3.2 |
2.9 |
2.9 |
| 16-Sep-2002 |
3.2 |
3.1 |
3.5 |
2.4 |
3.1 |
| 05-Jul-2003 |
3.1 |
3.1 |
3.2 |
3.0 |
3.1 |
The gain is calculated in a representative area in each quadrant, and
the same area is used for all dates. The overall median is the median
gain calculated from values obtained in 81 boxes over the whole array.
Since January 2003 the gain has been monitored regularly for both
readout modes. Check the monitoring results:
reset-read-read mode
ramp-sampling mode
Non-linearity
Non-linearity is an inherent feature of infrared arrays which
distinguishes them clearly from the linear CCDs. While the saturation
of the detector starts at 40000 ADUs the array is found to be linear
to 1% accuracy only up to about 15000 ADU on the average.
For each readout mode you can check the non-linear behaviour for each
of the four quadrants from the monitoring data:
reset-read-read mode
ramp-sampling mode
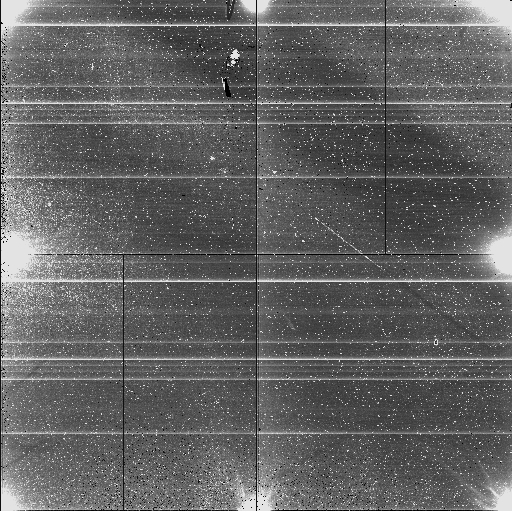
Detector flat field
Fig 6: Processed flat field obtained from 10 differential twilight
flats. The differential method (pair-wise subtraction of bright minus faint)
is used to eliminate the thermal contribution from the master flat. No bad
pixel correction was attempted, instead the final master flat was median
smothed by a 3 pixel box, which almost eliminates the bad columns.
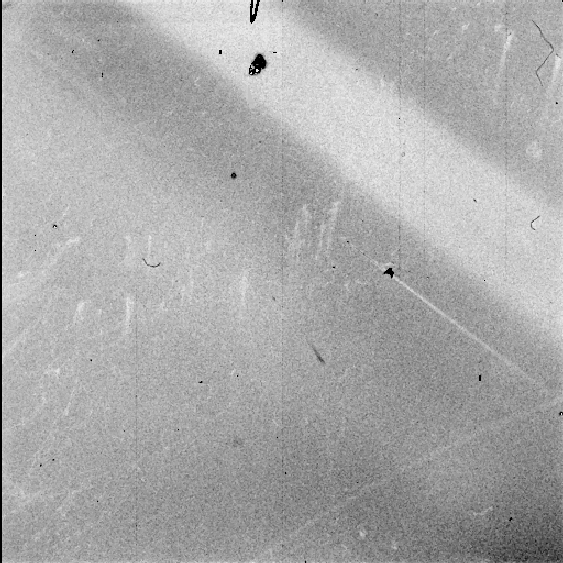
There are several cosmetic features on the engineering grade detector.
Most prominent is the bright band of higher quantum efficiency, a number
of larger areas with bad pixels, and some hair-like features. The standard
deviation in small boxes of 20 x 20 pixels is 3-4%. The deviation over the
whole field is +20% in the bright band and about -15% in the darkest
corner.
Please, check our archive of sky flats.
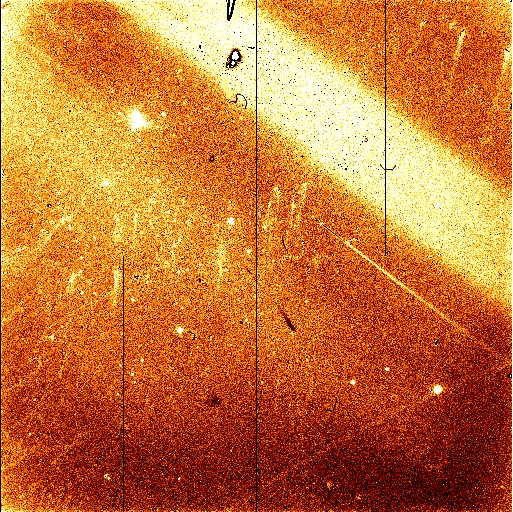
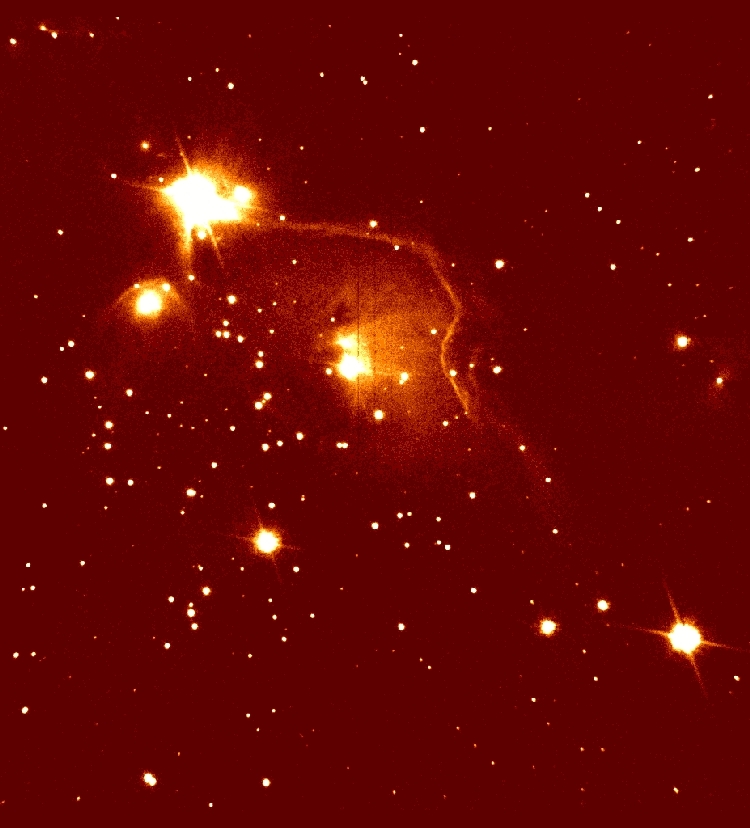
Example of raw and processed image
Fig 7: V361 Cep in the K band. A single raw image of 50 seconds
integration (left) and the sky-subtracted and flatfielded combined image
of 6 dithered images (right). The observations were done in beam-switch mode
using ramp-sampling readout. North left and East up. No bad-pixel
removal or correction of bad columns. Only dedicated sky subtraction using
off-target fields and flatfielding.
Comments to Anlaug Amanda Djupvik